
Moog introduced its Modular Multi-Axis Programmable Motion Control Servodrive (MSD) System at the SPS/IPC/Drives Exhibition (November 27 -29 2007) in Nuremberg, Germany. This new family of MSD Servodrives enables us to address unique application requirements of our customers with performance-based, tailored motion control solutions.
The MSD system consists of the Moog Motion Controller, Servodrive and a shared power supply unit. This system was developed to meet the demands of key industrial applications such as plastics and metal forming industries for higher productivity, higher accuracy and the flexibility to share technologies across multiple machine types.
Flexibility and High Performance
Some of the primary benefits of the MSD for customers that are testing this system are its flexibility and high performance characteristics. With the freely programmable Motion Controller, the MSD system is able to meet the toughest demands in the targeted industries. Due to its modular architecture, the system is able to control a wide range of servomotors such as brushless PM AC motors, torque motors, linear motors and asynchronous motors, allowing for flexibility in machine design. The MSD meets our customers' demand for increased machine output through many high-performance features.
- Fast update rates of current, position and velocity control loops for highest levels of dynamic response and machine precision
- Support for multiple communication protocols via fieldbus connection for an open architecture and machine versatility
- High speed internal communication via EtherCAT for control and coordination across multiple axes
- Comprehensive software package with IEC 61131 programming for quick and simple realization of the control software
- Support for up to three feedback devices like sin/cos single and multi-turn encoders for precise positioning
- User-friendly GUI for PC supported parameterization
- High safety functions according to IEC 61508
The MSD System
The main modules of the MSD system feature some key technologies and provide many benefits when used as a stand-alone product or a system.
The MSD Motion Controller (Figure 1) is based on a 32-bit, 400MHz microprocessor. The Motion Controller can coordinate and synchronize axes, and implements the communication to host computers and other PLCs. With its PLC functionality, it may itself control processes of the machine or parts of it. It may close velocity and position loops for up to 30 axes. Additionally, it is able to control input and visualization devices. It supports various communication protocols such as EtherCAT, SERCOS III, CANopen, CC Link, PROFIBUS DP and PROFINET. Internal communication takes place via EtherCAT buses.
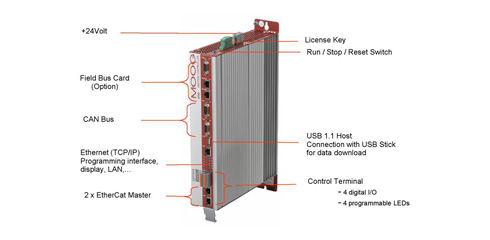
(Figure 1)
The Motion Controller supports IEC 61131 programming in a visual environment with embedded libraries for easy use. For "Advanced Control", programming of custom control loops using MathWorks/C/C++ is possible, which enables the creation of application-specific templates for deeper integration into the machine.
The MSD Servodrive (Figure 2) closes current loops (PWM frequencies 4, 8, 12 and 16 kHz) and is also able to close velocity and position control loops. For high-performance control loops, high update rates are supported: the MSD operates at cycle times of 62.5 µs for current and 125 µs for velocity and position loops. Currently, 7 mechanical sizes, based on output power, are available, ranging from 4 Arms up to 250 Arms. It supports feedback devices such as Resolver, EnDat and Hiperface as standard (customer application specific position feedback is possible upon request). Besides air-cooling as standard; cold plate and liquid cooling are available as options.
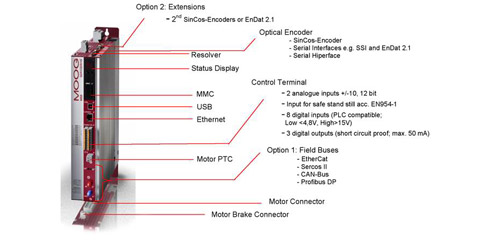
(Figure 2)
Some of the high-performance features of the MSD Servodrive are listed below:
- Feed forward structure for higher response time and reduced tracking error
- Compensation of friction torque and cogging torque
- Compensation of mechanical ballscrew errors for both directions
- Patented method (Gain Phase Offset Correction - GPOC) with correlation technique to compensate encoder and resolver errors (Figure 3)
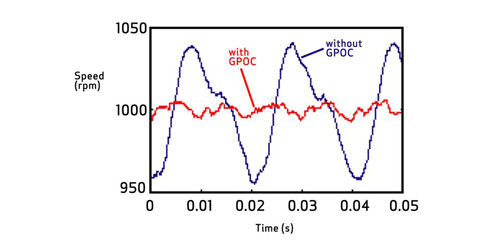
(Figure 3)
- Velocity observer (Figure 4): Instead of a filter for the actual value of the velocity an observer can be used. The observer reduces the noise like a velocity filter but with less delay of the velocity signal. It ensures not only higher gain for the velocity - and position controllers and reduced tracking error, but also makes tuning simple with only one parameter.
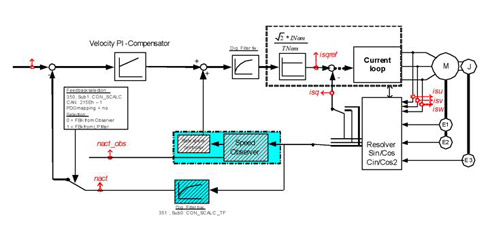
(Figure 4)
Figure 5 gives an overview of the currently available Servodrive sizes and their specifications.
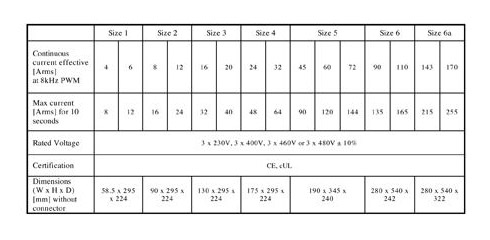
(Figure 5)
To ensure cost advantages for our customers with complex applications, we are developing a shared Power Supply Unit (PSU) of different sizes as an integral part of our MSD system.
The PSU will enable our customers to achieve economies of scale by saving energy and ensuring high-precision current supply for their applications. The PSU unit with active regeneration capabilities allows regeneration of energy in the electrical supply network and it ensures additional power for applications by boosting up the DC voltage to 750 VDC.
Flexible Architecture
Two main scenarios are described here to illuminate the architectural flexibility of the MSD system:
In the first scenario (Figure 6), the modules of the highly flexible MSD system control process cycles and close current, velocity and position loops for the required number of axes. Control of the process cycles and the closing of position and velocity loops are carried out either by the MSD Motion Controller or the MSD Servodrive, or both. The MSD system offers a comprehensive software package with motion control functionality to suit the needs of high performance machine applications. MSD supports different communication protocols via fieldbus (EtherCAT, CANopen, Profibus DP and Sercos, etc.), or even customer-specific protocols.
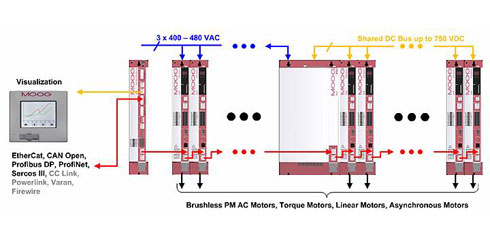
(Figure 6)
In the second scenario (Figure 7), the MSD system acts as an integration platform between various types of servomotors and an external host or machine PLC module from any 3rd party provider. Due to the great number of supported field bus communication protocols, the MSD system can seamlessly work together with existing control modules and motors used by our customers. The control of the process cycles is carried out by the superimposed host or machine PLC module. The MSD Servodrive may in this case close current, as well as velocity and position loops.
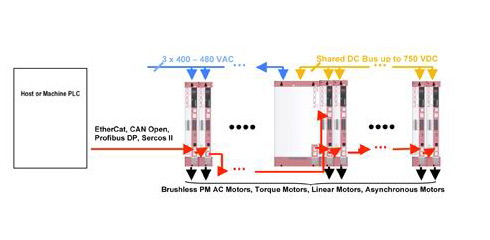
(Figure 7)
Author
Andreas Noll, Dipl. Ing., has extensive experience in product development in Servomotors and Servodrives. From 1992 to 2002 , he worked as the Engineering Manager for Moog Aerospace, Defence and Transportation (ADT), today's Defence Control Systems (DCS). Between 2002 and 2006, he gained experience as a Product Manager Motors and Drives in the industrial drives market. Since April 2006 he has been the Engineering Manager Drives, and has been responsible for new servodrive developments in the product line.
For further information on the MSD system, please contact your local Moog sales or send an email to anoll@moog.com.