The Orbital Maneuvering Vehicle (OMV) Simulation
Keith Owens (July 2016)
1. Tell us about yourself.
I have a Bachelors of Science from Caltech and a Masters of Science from the University of Arizona in Aerospace Engineering. Before working for Moog, I worked for a small engineering consulting company in Los Angeles that does vehicle analysis. That company works on every kind of vehicle you can imagine, from cars to blimps to underwater drones. My first project was designing the autopilot for the C-17 cargo transport. I also did launch vehicle simulations and taught a two-day course to other engineers.
On a subsequent consulting contract for them, I analyzed the stability of the Titan IV SRMU (Solid Rocket Motor Upgrade) hydraulic actuators. Those hydraulic actuators happened to be Moog products. That’s how I wound up with Moog connections and a job offer. I started at Moog in 1997 and have worked in the Space and Defense Group the entire time, doing mostly physics-based simulation modeling and analysis.
2. What is the OMV and why is it important?
The basic idea for OMV came from the Rideshare concept Click here to view our Rideshare blog. Big rockets are often launched with less payload than their full capacity can handle. Since rocket launches are fantastically expensive, the Rideshare concept came about to allow smaller satellites to pay part of the cost and hitch a ride with a larger payload. The ESPA (EELV Secondary Payload Adapter) docking ring gives smaller payloads a standard place to attach. The OMV is based on the Moog ESPA ring, plus propulsion and navigation. If a satellite needs to go 50 or 100 km higher or lower, into a slightly different orbit, we can take them there. You can’t make huge changes, but you’d be surprised how much relative energy is involved in just getting to orbit versus maneuvering once you’re up there. Even going on to other planets takes only about as much energy (in terms of change in velocity, or “delta-v”) as just getting off the Earth in the first place.
The OMV is a prime example of how Moog is trying to move from something we’re already good at —making components such as tanks, valve thrusters, avionics, and structures — to building and integrating a larger system, in this case a small spacecraft with its own propulsion system.
The OMV can do a variety of missions: you can drop off a constellation of a large number of small satellites at intervals along the same orbit like a string of pearls, you can host a satellite for years providing navigation, control and power via solar panels, and you can take a satellite to geosynchronous or lunar orbit.
3. Describe what’s involved with simulation modeling of a vehicle like the OMV.
As most people know, F=ma. That one equation gets you pretty far with actuators that generally only move in one direction. There is, of course, a whole host of hydraulic, pneumatic and electromagnetic phenomena that greatly complicates the modeling of actuators that fortunately enables the careers of systems engineers like me.
Things get complicated when you have an object that can move around in three-dimensional space. You must add vectors, Euler angles, inertia matrices and all that. The first 6-dof (6 degrees of freedom) model I did for Moog was for a hexapod ride motion platform. It had all the forces and movements of six actuators acting on the cab, and graphical animation too.
A few years ago our Orlando site had a program to build a GPS-guided gliding missile. I was tapped to help with the modeling and autopilot. It was technically successful – with a small team we built and flew a number of prototypes at various test ranges around the country. There were a few back-to-the-drawing-board failures, but by the end we could drop a glider from a plane thousands of feet up and it would automatically steer to a target on the ground. We did two vertical-take-off, rocket-powered vehicles as well, launched from a site in New Mexico.
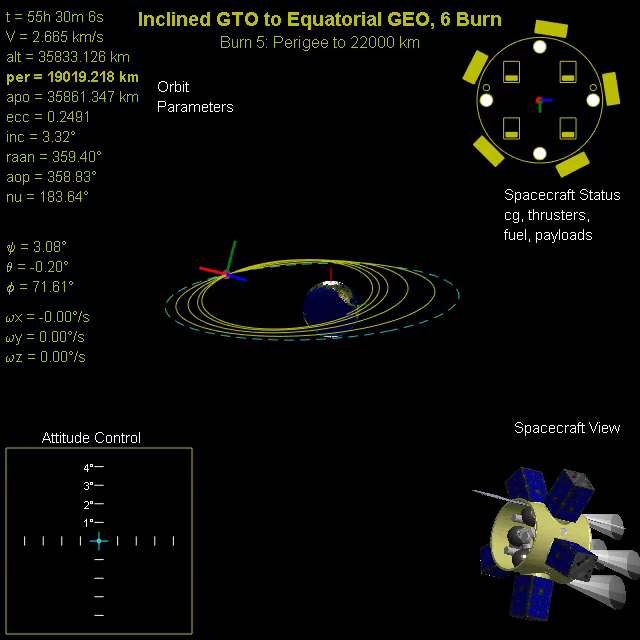
The OMV simulation was an extension of that work, and came about through our division in Golden, Colorado. It’s simpler in one way because it doesn’t need aerodynamics, but more complicated because of the orbital mechanics.