
Precision Positioning Hexapods
Jump To:
Overview
Literature
Related Products
APPLICATIONS
- Alignment of telescope optics
- Testing of precision optical systems
- Beam/laser pointing
Performance Characteristics
| HX-P400 | HX-P500 | |
| Payload mass | Up to 8000 kg | Up to 8000 kg |
| Dimensions1 | 1650 mm D x 720 mm H | 2000 mm L x 2000 mm W x 810 mm H |
| Hexapod mass | 625 kg | 684 kg |
Range of motion2
| HX-P400 | HX-P500 | |
| X (lateral) | ±20 mm | ±100 mm |
| Y (longitudinal) | ±20 mm | ±100 mm |
| Z (vertical) | ±15 mm | ±85 mm |
| Roll | ±1.2˚ | ±7.0˚ |
| Pitch | ±1.2˚ | ±7.0˚ |
| Yaw | ±0.5˚ | ±5.2˚ |
Minimum incremental step size
| HX-P400 | HX-P500 | |
| X (lateral) | 1 μm | 3 μm |
| Y (longitudinal) | 1 μm | 3 μm |
| Z (vertical) | 1 μm | 3 μm |
| Roll | <1 μrad | 1 μrad |
| Pitch | <1 μrad | 1 μrad |
| Yaw | 1 μrad | 1 μrad |
Repeatability (bidirectional)3
| HX-P400 | HX-P500 | |
| X (lateral) | 10 μm | 15 μm |
| Y (longitudinal) | 10 μm | 15 μm |
| Z (vertical) | 3 μm | 15 μm |
| Roll | 3 μrad | 3 μrad |
| Pitch | 3 μrad | 3 μrad |
| Yaw | 10 μrad | 15 μrad |
| HX-P400 | HX-P500 | |
| Actuation type | Brushless motor-driven roller screw | Brushless motor-driven roller screw |
| Sensor type | Absolute linear encoder | Rotary encoder |
| End-joint type | Flexures | Preloaded Bearings |
| Vacuum-compatibility | w/ customization | Yes |
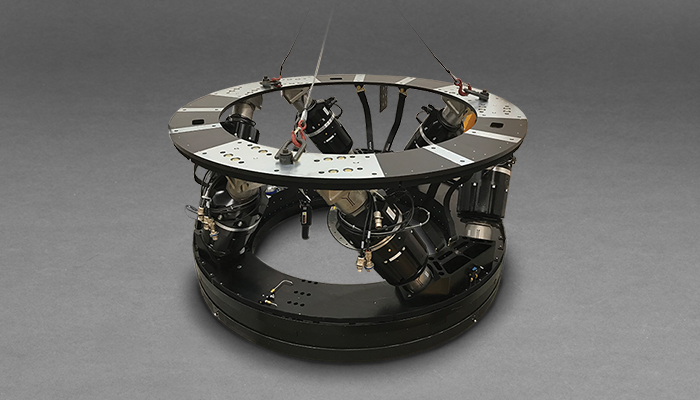
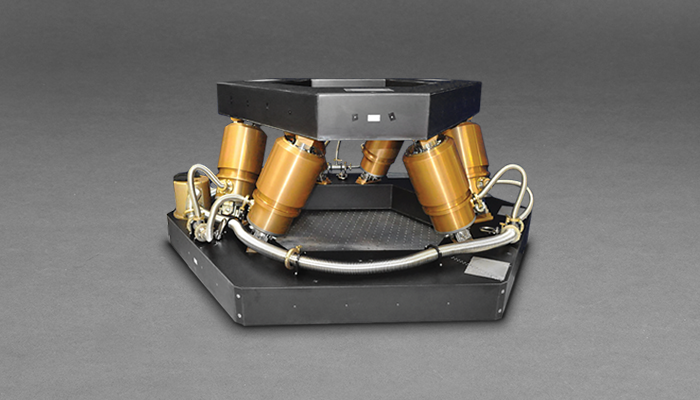
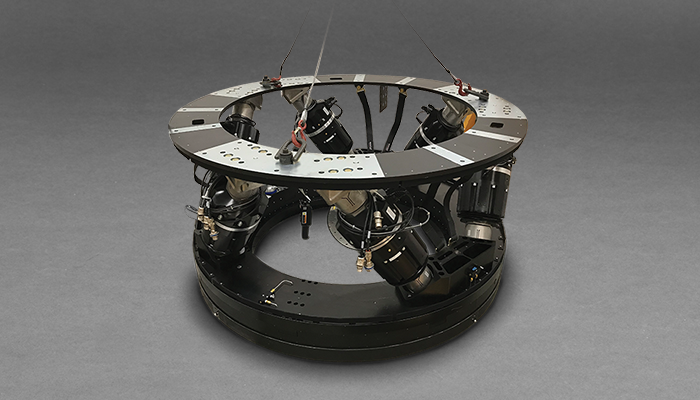
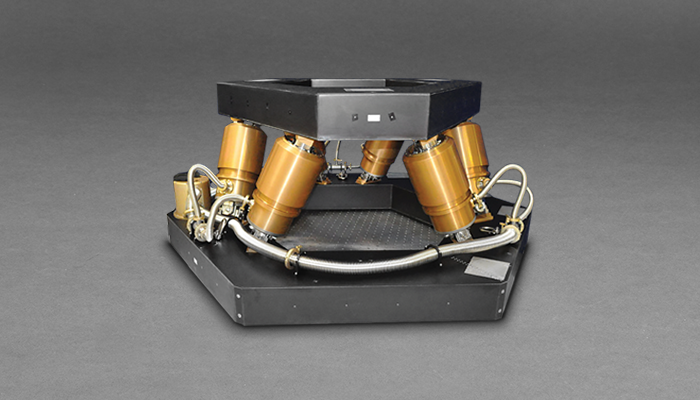
| Heritage usage | Rubin Observatory/Large Synoptic Survey Telescope (LSST) | James Webb Space Telescope testing |
1. Envelope dimensions and interfaces are typically customized to meet program-specific requirements
2. The ranges of motion of the six axes are interdependent. Listed values represent the maximum range with all other axes at their zero positions and the center of rotation at the center of the payload interface.
3. Unidirectional repeatability is typically 3X-5X smaller than bidirectional repeatability.