Hexapods & Positioning Systems






Moog’s 6-axis hexapods, also known as Stewart platforms, are parallel kinematic robotic systems capable of positioning or moving a payload in all six degrees of freedom (6-DOF): lateral, longitudinal, and vertical translations as well as roll, pitch, and yaw rotations. These 6-DOF hexapods can move simultaneously in multiple axes or independently in a single axis while preventing movement in the other axes. A hexapod’s parallel linear actuator arrangement provides high load capacity, stiffness, and accuracy compared to serial robotic manipulator architectures. Other motion control devices typically provide positioning, motion simulation, or vibration isolation in only one or two degrees of freedom making Moog’s high-performance hexapods the ideal solution when multi-axis motion is desired.
Moog’s hexapods are provided as a turnkey system complete with 6-DOF controller, software, and cabling. The control software allows for a programmable pivot point so the effective center of rotation of the hexapod’s motion can coincide with the desired location for any application. A simple and intuitive graphical user interface (GUI) allows a user to configure and operate a Moog hexapod within minutes. Cleanroom and vacuum-compatible versions are available as well as custom hexapods and multi-axis stages.
Why Choose Moog Hexapods?
Moog delivers hexapods that address a far broader set of applications and requirements than typical vendors — from ultra-heavy payloads to precise motion, harsh environments, and fully custom designs. Whether you need to move thousands of kilograms or perform high-frequency motion simulation, Moog has a proven solution.

Customization and flexibility
Where others will no‑bid unusual requirements, Moog will modify standard designs or deliver fully custom systems — from simple changes like custom bolt patterns or volume envelopes to added stages for extended travel.

Applications beyond positioning
Our platforms handle precision positioning, high-frequency motion simulation, and vibration isolation.

Increased payload capacity
We build hexapods for payloads up to 8,000 kg.

Environmental readiness
Designs are available for extreme temperatures, vacuum, cleanroom, and outdoor use (including rain and salt spray).
Precision Positioning Hexapods
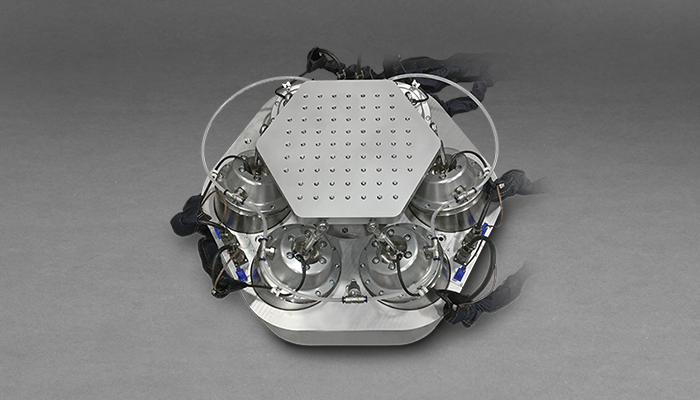
Precision positioning hexapods are used for point-and-hold or slow tracking operation where minimum incremental step size, repeatability, and/or accuracy are critical.
Motion Simulation Hexapods
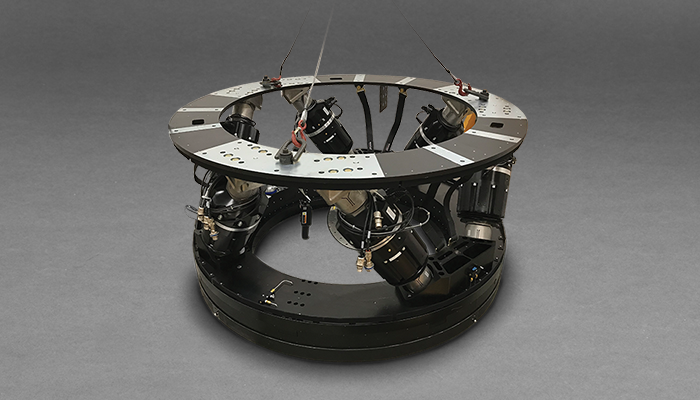
Motion simulation hexapods are used for high frequency motion replication and disturbance generation. Our systems use voice coil actuators to provide large accelerations and high bandwidths.
Vibration Isolation Hexapods
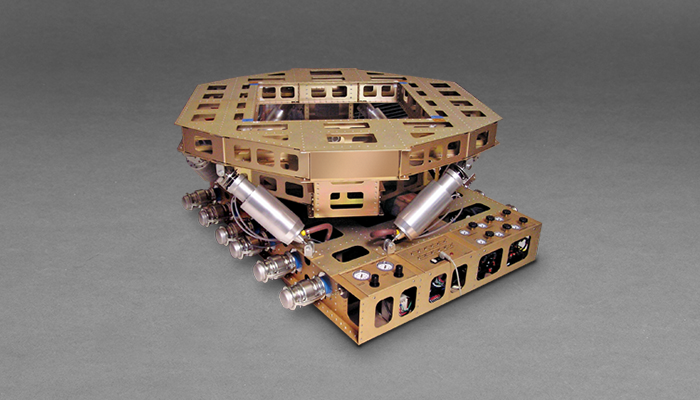
Vibration isolation hexapods are used to isolate a payload from a base disturbance source or isolate the base structure from a payload-induced disturbance.
Custom Systems

Sometimes the hexapod needs to match the application rather than trying to make the application match the hexapod. We are able and willing to modify our standard hexapods to meet specific customer requirements including extreme environments. For unique applications, we also build custom hexapods that leverage off our heritage designs. If you cannot find a standard hexapod that meets your needs, please contact our engineering team to discuss.
Space Test Simulation Solutions
Vibration Isolation Benches
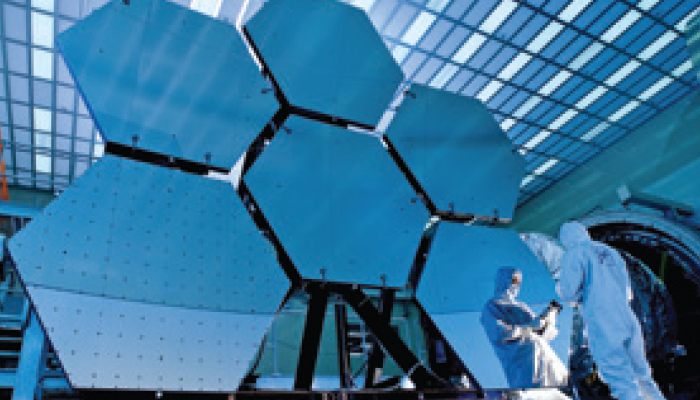
Ultra-precise metrology systems and test facilities for large space optics require extremely stable, quiet environments. Moog’s vibration isolation benches mechanically decouple the bench from facility disturbance sources including pumps, machinery, or nearby vehicle traffic.
Gravity Offloaders for Zero Gravity Simulation
Gravity influences structures differently on orbit, but those structures must be integrated and validated on the ground. A deployable spacecraft appendage is often mass-optimized for zero gravity performance but unable to support its own weight on Earth.