Antenna Pointing Mechanisms


Antenna Pointing Products
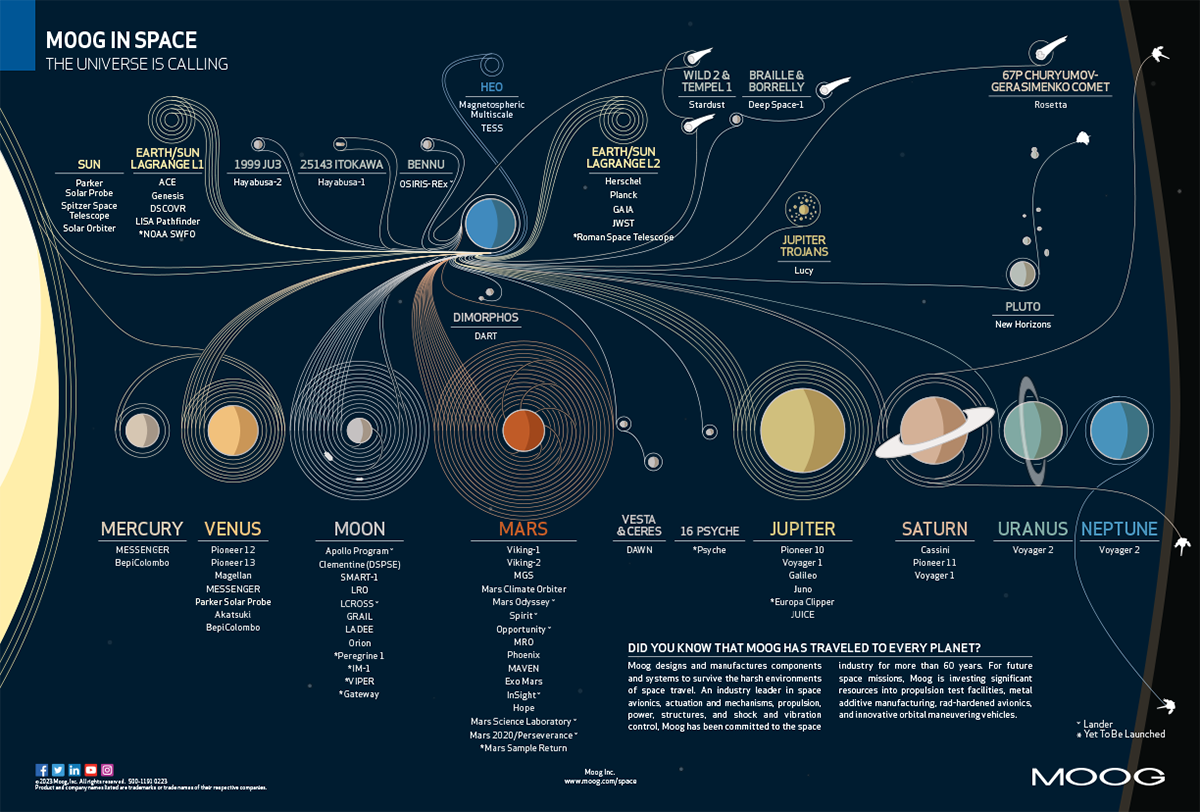
Type 22 Antenna Pointing Mechanism

The Type 22 antenna positioner assembly is a compact two-axis gimbal which is ideally suited for supporting and positioning small to medium sized spacecraft communications antennas. It is based on the Moog Type 2 rotary incremental actuator
Type 33 Biaxial Gimbal

The Type 33 Biaxial Gimbal is of a size appropriate for many antennas, and it has become by far our most popular Antenna Pointing Mechanism configuration. Available in either Elevation/ Azimuth or X/Y, these units have proven their reliability and versatility many times over.
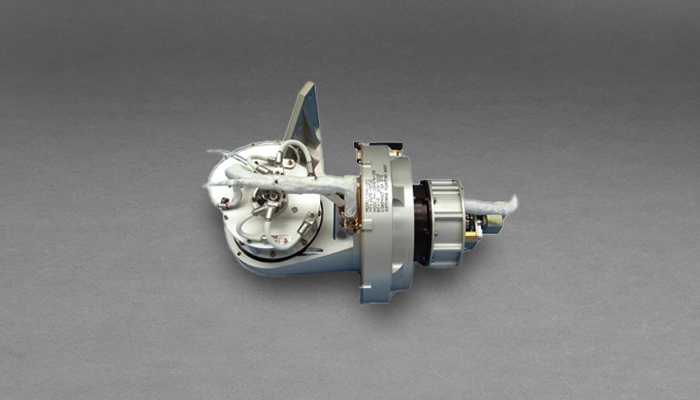
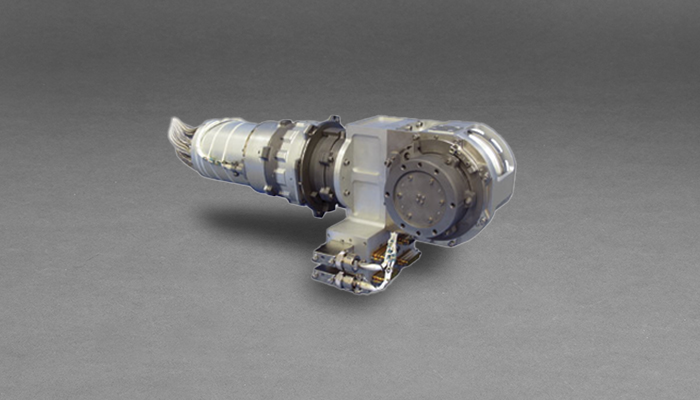
Type 55 Biaxial Gimbal Assembly
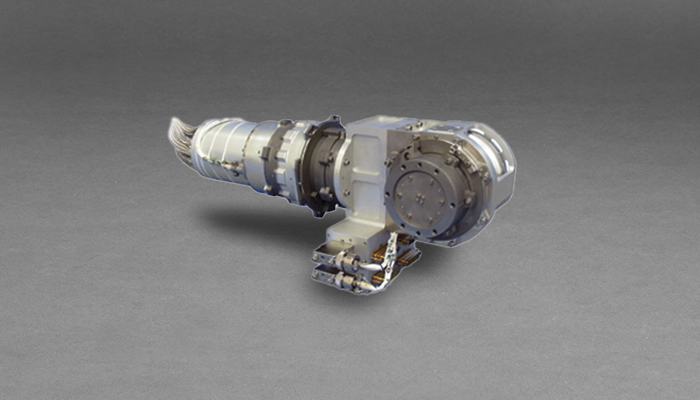
The Type 55 biaxial gimbal assembly is a robust two-axis gimbal which is right-sized for supporting and positioning the majority of larger payloads. It is based on the Moog Type 5 rotary incremental actuator. The gimbal can be configured for limited rotation, with the inclusion of range-defining hard stops on the actuator outputs, or, for continuous rotation on one or both axes with the integration of a slip ring assembly.
Type 11 Biaxial Gimbal

The Type 11 biaxial gimbal as shown consists of two Type 1 actuators in an orthogonal combination. The Type 1 actuators can be provided with a variety of options. These gimbals can be used for two-axis antennae or solar array drives.